


Ну да да, не ось, а плоскостьSerega iz Nvmskovska писал(а):Ты уверен? ))
Гироскопический эффект
-
Michael13

- На форуме: 14 Лет 2 Месяцев
- Сообщения: 1,736
- Зарегистрирован: Ср май 30, 2012 19:15
- Род занятий: Риски
- Откуда: Москва
- Имя: Михаил
- Мотоцикл: F4i => Triumph Tiger 800 XCx
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Любишь кататься? Люби и катайся!
-
maxys146

- На форуме: 13 Лет 8 Месяцев 16 дней
- Сообщения: 20,049
- Зарегистрирован: Чт ноя 15, 2012 09:34
- Откуда: msk
- Имя: Макс
- Мотоцикл: Motocross only
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Опозитом называют мотор у которого цилиндры расположены друг напротив друга.
Michael13, а про что говоришь ты может быть и рядником, и опозитом, и V-образником.
У пана тоже такой эффект есть(заваливание) но он не опозит а V4(или 6, не помню)
Michael13, а про что говоришь ты может быть и рядником, и опозитом, и V-образником.
У пана тоже такой эффект есть(заваливание) но он не опозит а V4(или 6, не помню)
Учись ездить, а не гонять!
-
Michael13
- На форуме: 14 Лет 2 Месяцев
- Сообщения: 1,736
- Зарегистрирован: Ср май 30, 2012 19:15
- Род занятий: Риски
- Откуда: Москва
- Имя: Михаил
- Мотоцикл: F4i => Triumph Tiger 800 XCx
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Да я не спорю, главное расположение осей, а не компоновка.maxys146 писал(а):Опозитом называют мотор у которого цилиндры расположены друг напротив друга.
Michael13, а про что говоришь ты может быть и рядником, и опозитом, и V-образником.
У пана тоже такой эффект есть(заваливание) но он не опозит а V4(или 6, не помню)
Любишь кататься? Люби и катайся!
-
Ald
- На форуме: 13 Лет 10 Месяцев 26 дней
- Сообщения: 41
- Зарегистрирован: Чт сен 06, 2012 08:01
- Род занятий: инженер
- Откуда: Лыткарино
- Имя: Александр
- Мотоцикл: 2 мопеда
- Пол:
Re: Гироскопический эффект
а как же прецессия?fatcat писал(а):Так ить гироскоп (сам по себе) ничего завалить не может , только удержать
-
Serega iz Nvmskovska
- На форуме: 16 Лет 1 Месяц 12 дней
- Сообщения: 8,695
- Зарегистрирован: Пт июн 18, 2010 19:03
- Откуда: ...см. выше
- Имя: Сергей
- Пол:
Re: Гироскопический эффект
А какая именно - вертикальная или горизонтальная? А может это плоскость повернутая, это же плоскость тела вращения ))Michael13 писал(а):Ну да да, не ось, а плоскость
-
Michael13
- На форуме: 14 Лет 2 Месяцев
- Сообщения: 1,736
- Зарегистрирован: Ср май 30, 2012 19:15
- Род занятий: Риски
- Откуда: Москва
- Имя: Михаил
- Мотоцикл: F4i => Triumph Tiger 800 XCx
- Пол:
- Контактная информация:
Re: Гироскопический эффект
А вот это, кстати, вообще не важно :PSerega iz Nvmskovska писал(а):А какая именно - вертикальная или горизонтальная? А может это плоскость повернутая, это же плоскость тела вращения ))
Любишь кататься? Люби и катайся!
-
Serega iz Nvmskovska
- На форуме: 16 Лет 1 Месяц 12 дней
- Сообщения: 8,695
- Зарегистрирован: Пт июн 18, 2010 19:03
- Откуда: ...см. выше
- Имя: Сергей
- Пол:
Re: Гироскопический эффект
Лан, будем щетать, что ты ляпнул неподумавши, на этом и закончим к тебе дойопывацо )) Звиняй, если обидел ))Michael13 писал(а):А вот это, кстати, вообще не важно :P
-
Lurker-beta
- На форуме: 17 Лет 6 Месяцев 11 дней
- Сообщения: 4,968
- Зарегистрирован: Вт янв 20, 2009 17:43
- Род занятий: IT
- Откуда: Москва
- Имя: Алексей
- Мотоцикл: Фазер 0.2633856 куб. попугая
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Важно. если вращение в горизонтальной плоскости, то изменение оборотов будет не пытаться наклонить матоцикл, а пытаться его развернуть. Потому всегда говорят про ось вращения.Michael13 писал(а):А вот это, кстати, вообще не важно :P
Ну как бы осаживание зада не имеет отношения к моменту двигателя. И зад не всегда осаживается. Более того на мотоциклах вроде приподнимается даже чаще.крутящий момент двигателя ( при разгоне зад осаживается )
Любой мотоцикл прослужит вам до конца жизни, если ездить на нём достаточно быстро.
Игнор лист:Bungle
Игнор лист:Bungle
-
Ромка-лодырь

- На форуме: 12 Лет 11 Месяцев 15 дней
- Сообщения: 1,228
- Зарегистрирован: Вс авг 18, 2013 16:10
- Откуда: Москва
- Имя: Ромка
- Мотоцикл: Пан
- Пол:
- Забанен: Бессрочно
Re: Гироскопический эффект
У тебя мозги кривые. Для личной информации посмотри, как расположен двигатель у Honda Pan-European. Пригодится.Michael13 писал(а):Оппозит при том, что у него ось вращения деталей двигателя идет не вдоль мотоцикла, а поперек.
А у тебя видимо просто рама кривая
Добавлено спустя 5 минут 38 секунд:
V4maxys146 писал(а):У пана тоже такой эффект есть(заваливание) но он не опозит а V4(или 6, не помню)
По утрам надев усы, не забудьте про часы.
Д.С. Песков.
Д.С. Песков.
-
Sokos
- На форуме: 15 Лет 2 Месяцев 13 дней
- Сообщения: 1,130
- Зарегистрирован: Ср май 18, 2011 08:14
- Откуда: Владимир
- Имя: Владимир
- Мотоцикл: H-D
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Вы, наверное, знаете, что быстрое вращение придает телам устойчивость. Возьмите детский волчок, раскрутите его и попробуйте качнуть вбок. Сразу почувствуете, что он сопротивляется — не желает наклоняться ни вперед, ни назад.TinaoCitizen писал(а):Не буду ничего описывать, потому что сам не знаюА именно интересно:
Каково влияние гироскопического эффекта колёс и элементов двигателя/трансмиссии на поддержание мото в вертикальном положении? Понятно, что зависит от скорости, но насколько?
Каков вклад вращения валов в общую копилку?
Кто-нибудь проводил эксперимент: удержание равновесия в статике на мото с неработающим двигателем и с работающим, допустим, на максимальных оборотах?
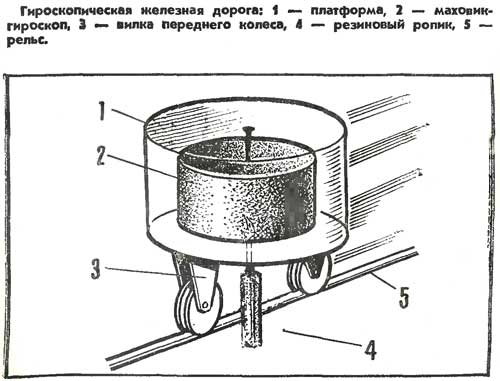
На рисунке 1 показана железная дорога. Устройство ее ясно из рисунка. Платформа, внутри которой быстро вращается массивный маховик, движется по одному рельсу — и не падает!
Устойчивость ей придает гироскопическое свойство маховика. Его раскручивают при помощи нити. На одной оси с ним — резиновый ролик, который прижат к рельсу. Он-то и создает тягу.
Модели таких железных дорог выполняют обычно в виде горизонтального проволочного кольца, установленного на столбах. Могут ездить поезда и по канату.
Еще в начале века предлагали на этом принципе сделать трамвай. Однако тогда сочли, что это дорого и недостаточно надежно. Но все течет, все меняется. И кто знает, не стоит ли вновь вернуться к этой идее.
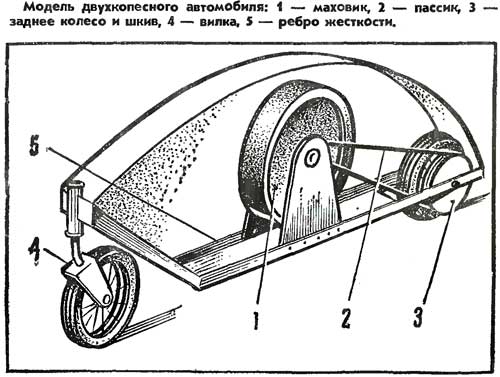
На рисунке 2 показан двухколесный гироскопический автомобиль. Его раму можно спаять из жести. Только не забудьте отогнуть края, тогда конструкция приобретет необходимую жесткость, а машина получится и легкой, и прочной.
Переднее колесо возьмите от старой игрушки и установите в жестяной вилке, отогнутой не вперед, как у велосипеда, а назад.
Благодаря этому оно не будет спотыкаться о препятствия, а объедет их. Заднее колесо вместе со шкивом целесообразно выточить из дюралюминия. Роль покрышки выполнят два-три слоя изоленты на тканевой основе. Маховик — тон-вал от старого магнитофона, а для приводного ремешка подойдет резиновый пассик. Автомобиль движется за счет инерции маховика.
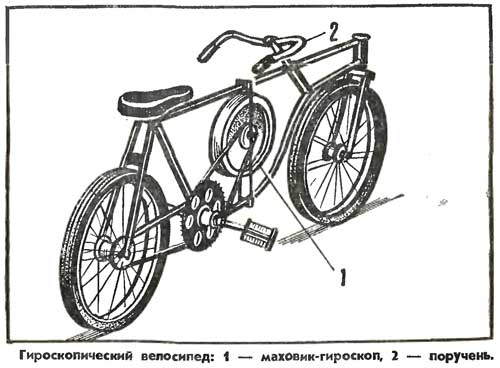
Велосипед, что приведен на рисунке 3, устойчив, даже когда неподвижен. Достигается это также благодаря маховику, установленному на раме. Переднее колесо самоустанавливающееся, наподобие того, что у автомобиля, а руля нет. Есть только поручни, за которые человек держится. Управляет он движением только при помощи наклона корпуса. Ездить на таком велосипеде будет мудрено, но это-то и интересно. Ведь назначение его спортивно-развлекательное.
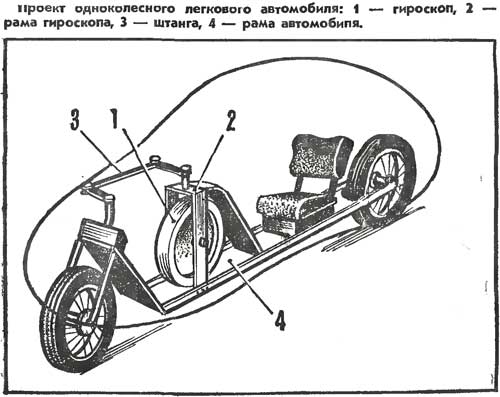
То, что показано на последнем рисунке, — уже не игрушка, а один из проектов одноколейного автомобиля. Здесь в поворотной рамке установлен маховик-гироскоп. Его назначение — отклонять руль, с которым он соединен при помощи штанги. Вспомните, наклоняясь вправо, велосипедист и руль поворачивает вправо, наклон влево — и руль туда же. То же самое делает и гироскоп, установленный на машине.
Во время движения такой автомобиль весьма устойчив, а на остановках автоматически выдвигаются маленькие колеса-подпорки (на рисунке они не показаны).
Управляется же автомобиль весьма хитро. Чтобы не вмешиваться в работу гироскопа, используют гидравлический механизм, который то удлиняет, то укорачивает штанги, передавая усилие через шарниры на колесо. Эти узлы мы тоже не показали, но вы легко можете их представить.
РАВНОВЕСИЕ.
Как любой одноколейный транспорт мотоцикл нестабилен в статическом положении, т.е. - падает, будучи оставленным без движения и дополнительной опоры.
Однако двигаясь уже с минимальной скоростью, даже неискушенный райдер обнаруживает, что машина становиться способна удерживать равновесие сама. Мы рассмотрим два случая, при малой и относительно большой скорости. Конечно, всегда найдется парень, который сможет удерживать в балансе и неподвижный байк, но большинству из нас для этого потребуется минимальное движение. Однако на таких малых скоростях нам придется размахивать рулем от упора до упора, чтоб удерживать систему. И любой триальщик знает, что это делать значительно легче стоя на подножках. Давайте разберем почему. Рис 1 показывает проекции сзади и снизу системы мотоцикл и мотоциклист. Если Центр Тяжести всей системы (Ц.Т.) находиться точно над линией соединяющей пятна контакта передней и задней шин, то система уравновешена. Но это очень шаткое положение, любое стороннее вмешательство вроде дуновения ветра легко провоцирует опрокидывание, т.е. центр тяжести уходит в сторону.

Этого можно избежать одним из двух способов или их комбинацией. Один это передвинуть ось между пятнами контакта под новый Ц.Т.. Если мотоцикл неподвижен, этого можно добиться просто поворачивая руль. Но в движении мы с легкостью поворачиваем весь мотоцикл, так, чтоб ось между пятнами контакта колес была там, где нам это нужно, поэтому и держать равновесие в движении намного легче.
Другой способ удержания равновесия на малом ходу это смещение
центра тяжести системы мотоцикл-мотоциклист так, чтоб она всё-время находилась над линией соединяющей точки опоры мотоцикла — пятна контакта шин. Так спортсмены мото-триала смещают свое тело из стороны в сторону стоя на подножках. Высокий Ц.Т. тела спортсмена позволяет с большим эффектом влиять на систему и свободней управлять Ц.Т.. Таким образом, удержание равновесия на низкой скорости зависит от ловкости и умения байкера. Вдобавок, некоторые характеристики байка также могут повлиять на его стабильность, вот главные:
Низкий Ц.Т.
Больший вынос вилки смещает опору сильнее, при тотм-же движении руля.
Малый угол вилки уменьшает заваливание переднего колеса при повороте, что также положительно влияет на стабильность.
Механика стабилизации на большой скорости устроена сложнее, зато в значительно меньшей степени зависит от навыков пилота. Чтоб лучше её понять будет полезным взглянуть на некоторые свойства гироскопов, которыми собственно и являются вращающиеся колеса мотоцикла.

Вращающееся колесо имеет стабильную ось вращения, т.е. стремиться удерживать заданную плоскость вращения. Другими словами, в то время как колесо с легкостью перемещается вдоль плоскости вращения, оно противостоит наклону в любой другой плоскости. И что более важно, при повороте, оно создает мощный крутящий момент под углом в 90град к направлению изначального воздействия. Этот эффект прямо зависит от скорости вращения колеса, и известен как гироскопическая прецессия. Когда Вы это дочитаете, я думаю, Вы снимите переднее колесо с велосипеда вашего младшего брата, и затем, следуя инструкциям, получите опытную демонстрацию прецессионных сил, которые жизненно важны для стабилизации и управления любым мотоциклом. В первую очередь возьмите колесо прямо перед собой как на Рис 2, попросите вашего брата (ведь он не будет в это время кататься на велосипеде, правда?) раскрутить колесо так, чтоб оно крутилось «вперед» от Вас. Затем, если Вы попробуете наклонить ось за которую держите колесо ВЛЕВО (аналог наклона мотоцикла влево) колесо моментально сделает поворот ВЛЕВО, как если бы было повернуто невидимой рукой. Другими словами, ваша попытка наклонить колесо вокруг его продольной оси производит дополнительный момент вращения вокруг его вертикальной оси. Теперь попробуйте ещё раз, только на этот раз поверните колесо ВЛЕВО вокруг его вертикальной оси, при этом оно с пропорциональным усилием завалиться ВПРАВО. Попробуйте оба эти действия ещё раз, при разных скоростях вращения колеса, и разных скоростях наклона его по осям, и вы убедитесь в том, что силы прецессии зависят строго от этих факторов. Особенно отметьте направления в которые работают эти силы, т.к. это важно для понимания процесса стабилизации. Теперь давайте разберем, как эти силы удерживают машину в равновесии на прямом участке пути, без участия водителя. Предположим, мотоцикл, двигаясь бесконтрольно по прямой на средней скорости, начинает заваливаться влево под каким-то внешним воздействием. Как мы только что наблюдали, гироскопическая прецессия переднего колеса тут же повернет переднее колесо влево. Это изменит траекторию транспортного средства по кривой влево, что создаст центробежную силу (вправо), которая компенсирует наклон и направит машину к вертикальному положению, прецессионные силы тут же будут работать в обратном направлении — стремиться вернуть руль в положение «прямо». На практике, то что мы называем движением по прямой, есть ни что иное, как серия корректирующих волнообразных движений. Если мы посмотрим на след, который оставляют наши колеса, то увидим, что след переднего колеса постоянно пересекает след заднего. В объяснении выше, я описывал воздействие только на переднее колесо, но силы прецессии также действуют и на заднее. Но задним колесом значительно тяжелее управлять независимо, так как тут весь байк должен завалиться, а не просто колесо и вилка, как в случае с передним колесом. Следовательно, только небольшой вклад вносит заднее колесо в процесс удержания равновесия машины. Мы рассмотрели случай только равновесия на прямой, но в поворотах добавляется ещё ряд сил участвующих в процессе равновесия в новых условиях.
Управление (Повороты)
Чтоб разобрать это, мы можем разделить процесс на две фазы:
Инициация поворота
Собственно поворот.
Начнем со второй части, как с более понятной. Невозможность на мотоцикле проходить поворот в вертикальном его положении объясняется тем, что центробежные силы, возникающие в процессе, опрокинут его наружу поворота. Следовательно, мы заваливаем его внутрь на такой угол, который позволяет уравновесить центробежную силу и стремление мотоцикла упасть внутрь поворота. См. Рис. 3

Равновесие достигается, когда угол наклона уравнивает две разнонаправленные силы, одна это центробежная сила направленная наружу (относительно поворота), другая это сила тяжести направленная вниз. Угол, который зависит от радиуса поворота и скорости движения мотоцикла, таков, при котором сумма векторов двух сил проходит через точку опоры мотоцикла — линию соединяющую пятна контакта передней и задней шин. Это уравновешенное положение при неизменном радиусе поворота. Но как происходит инициация поворота? Что делать с начала — наклонять или поворачивать? Давайте разберем, что происходит в каждом из случаев. Если мы повернем руль в направлении, в котором мы собираемся поворачивать, то и центробежная сила и прецессия будут отклонять мотоцикл наружу, что неизбежно приведет к вылету. Но, если мы одномоментно попробуем повернуть руль в противоположном направлении, (называемое контр рулением) тогда эти две силы объединяться чтоб «завалить» мотоцикл в нужном нам направлении. Сила тяжести будет стремиться наклонить мотоцикл глубже, а это заставит гироскопические силы поворачивать переднее колесо в сторону поворота, что сбалансирует все силы описанные выше и будет удерживать байк на заданной траектории. Вы скажете, это всё замечательно, но если это единственный способ поворачивать, как же нам удается управлять мотоциклом без рук. Да, это возможно, но с рядом дополнительных трудностей. Точный контроль или же поворот с малым радиусом на практике очень сложно осуществить без воздействия на ручки руля. Попробуйте! Давайте представим ситуацию с поворотом «без рук». Как мы наблюдали ранее, только лишь наклон байка приводит к повороту переднего колеса в сторону поворота благодаря прецессии. Но как нам заставить байк наклониться, где найти точку опоры? У нас нет никакой неподвижной опоры, и поэтому единственный способ инициировать наклон (не прибегая к помощи руления), это оттолкнуть машину, используя инерцию своего тела. На практике это обозначает, что чтобы наклонить мотоцикл направо, мы должны отклонить наше тело налево. И теперь мы имеем два способа инициировать поворот, и интересно отметить, что в обоих случаях (наклон и поворот руля в противоположную сторону) наши фактические действия противоположны тому, что нам изначально кажется естественным, но в процессе обучения мы адаптируемся и необходимые действия быстро становятся для нас естественными и автоматическими. И пока эти отзеркаленные действия у нас четко не зафиксируются в голове, мы испытываем трудности с управлением, пока рефлекс контр-рулить и контр-наклоняться не станет для нас естественным и неотъемлемым. Как только удалось переключить рефлексы на эти обратные действия, они становятся для нас инстинктивными и остаются с нами на всю жизнь, и даже садясь на мотоцикл после длительного перерыва не испытываем никакого дискомфорта и нет необходимости обратно учиться держать равновесие и управлять им. Так какой же из этих двух способов инициировать поворот мы обычно используем на практике? Оба, подсознательно мы используем оба способа. И нажимая на внутреннюю грипсу (ручку руля) часть усилия толкает её вперед (контр-руление) а часть вниз (укладывание мотоцикла). Но не следует забывать, что на практике усилие прилагаемое при контр-рулении очень мало, поскольку силы гироскопической прецессии зависят в первую очередь от скорости поворота руля, нежели от расстояния на которое он повернут. Если Вы до сих пор сомневаетесь, что поворачивать руль надо в противоположную повороту сторону, попробуйте при следующем катании дернуть ручку руля быстро в сторону и посмотрите что будет. Только оставьте больше места, если вы сомневаетесь в том, что сможете быстро восстановить контроль. Сделайте это примерно на 50км/ч, и я не несу ответственности за последствия в случае вашего падения. Соотношение, с которым мы применяем эти два способа зависят как от личных предпочтений и стиля езды, так и от скорости и характеристик машины. Так, тяжелый байк с легкими колесами на малой скорости требует совершенно другой техники нежели облегченный с тяжелыми колесами двигающийся быстро и следовательно ощущения от езды будут совершенно разными. Но человек адаптируется быстро, и скоро правильная техника становиться для него природной, естественной. Вам может показаться странным, что мы совсем не упоминали такие важные параметры, как геометрия вилки, размер колес и шин, колесная база, жесткость рамы и т.п. Причина этому в том, что удерживать равновесие и поворачивать можно одинаково в широком диапазоне этих параметров. Не то, чтоб эти факторы были не важны. Сейчас мы рассмотрим ближе один из параметров геометрии вилки, это ВЫНОС. Рассмотрите рис.4, где показаны основы геометрии мотоцикла.
ВЫНОС.
Как считается, первостепенная его функция это создание определенной стабилизирующей силы при движении по прямой, которая дополняет гироскопический эффект описанный выше. Но есть у него и другие свойства, которые жизненно важны при управлении мотоциклом.

Рис.4 показывает что точка контакта и переднего и заднего колеса с дорогой, находятся сзади точки пересечения оси вращения вилки и земли. Это вызывает стабилизирующий эффект и на переднем и на заднем колесе, аналогично колесику тележки из супермаркета. Это расстояние и называется выносом. Механику возникновения этого стабилизирующего эффекта можно понять по рис.5.

Если положения колеса становиться отличным от прямолинейного, т.е. оно становиться под углом к направлению движения (это называется углом увода), возникает сила возвращающая его к прямолинейному положению. Поскольку пятно контакта находиться сзади оси поворота вилки (положительный вынос) сила воздействует на рычаг (примерной равный выносу) и создает корректирующий момент к повернутому колесу. То есть, если возникают какие то отклонения руля, скажем, из-за неровностей дороги, то положительный вынос автоматически противодействует этому и создает соответствующий стабилизирующий эффект. Но, как было показано ранее, мы не можем рассматривать никакие эффекты управления изолированно, гироскопические силы тоже должны быть учтены. В данном случае достаточно сказать, что вынос и гироскопическая прецессия работают за одно в непростом деле стабилизации мотоцикла. Хотя с первого взгляда кое-что ещё остается без должного внимания, поскольку у заднего колеса вынос значительно больше нежели у переднего, в данном случае оно даже становиться более важным.

Представьте, что пятно контакта каждого колеса при повороте смещается на одинаковую величину (скажем на сантиметр). Переднее колесо при этом будет повернуто примерно на 7-10 град (в зависимости от длинны выноса) при этом угол увода переднего колеса будет аналогичный, это создает силу, которой достаточно преодолеть незначительную инерции переднего колеса и вилки чтоб вернуть их в прямолинейное положение. Но угол увода смещенного заднего колеса будет значительно меньше (около 0.5 град) и соответственно будет меньше выравнивающая сила, но ей так же придется противодействовать инерции мотоцикла и райдера,
следовательно реакция будет значительно медленней нежели в случае с передним колесом. Отсюда следует, что чрезмерное увеличение выноса с целью повышения стабильности имеет отношение к закону убывающей отдачи. Ещё следует подчеркнуть, что возмущения, возникающие на заднем колесе из-за смещения пятна контакта, имеют значительно меньшее влияние на поведение машины в целом, чем от переднего, вследствие того, что воздействуют под намного меньшим углом. И ко всему, кроме того, что большой вынос заднего колеса не дает ему возможности интенсивно восстанавливать свое положение, а следовательно и стабилизирующий эффект от него так же незначительный, а следовательно им можно пренебречь. Как было замечено выше, есть другие параметры зависящие от выноса кроме курсовой устойчивости, давайте рассмотрим некоторые ещё более важные.
ПОДРУЛИВАЮЩИЙ ЭФФЕКТ
Если наклонить неподвижную машину в одну сторону и покрутить рулем из стороны в сторону, передняя часть будет заметно подниматься и опускаться в зависимости от положения руля. В движении, вес мотоцикла и водителя приходящийся на вилку передается на опору через пятно контакта шины. Эта сила стремиться развернуть переднее колесо так, чтоб вилка была в нижнем её положении (т.е. с минимальной потенциальной энергией). Для заданного выноса, угол поворота рулевого колеса зависит от угла вилки и диаметра переднего колеса. Именно поэтому изменение только диаметра переднего колеса, так сказывается на управляемости. И пока вынос у нашего мотоцикла положительный, а другим он и не может быть, мы ощущаем этот эффект в повороте. Так величина выноса переднего колеса влияет на усилие которое приходиться прикладывать райдеру (обратная связь на руле) чтоб точно удерживать нужный угол для данного поворота и скорости байка. На одной технике кажется, что нужно докладывать его в поворот дополнительно, на другой — что нужно перекладывать свой вес в противоположную сторону. Эти реакции байка также сильно зависят от выбранного типа шин, но это уже тема отдельной статьи.
КУРСОВАЯ УСТОЙЧИВОСТЬ.
Как мы все знаем, что даже при прямолинейном движении по мокрому и скользкому покрытию руль ощущается более легким, нежели на сухом. Это происходит, как мы описывали выше, из-за того, что наша прямая вовсе и не прямая, а серия корректирующих равновесие кривых, с постоянно двигающимися из стороны в сторону рулем.
Также мы наблюдали малые смещения руля вызванные корректирующим моментом возникающих углов увода. Кроме самого угла увода, на силу этого корректирующего момента также влияют характеристики выбранных шин, коэф. сцепления покрытия и величина выноса. На менее цепких покрытиях корректирующие силы меньше, таким образом через руль мы получаем информацию (в зависимости от выноса) о сцепных свойствах покрытия. Так байк с маленьким выносом может давать ощущения скользкого покрытия на мокром и вызывать излишнее опасения, и напротив, длинный вынос, в тех же условиях может даль ложное чувство безопасности, и результатом может стать излишняя неосмотрительность с предсказуемым итогом.
-
Ромка-лодырь
- На форуме: 12 Лет 11 Месяцев 15 дней
- Сообщения: 1,228
- Зарегистрирован: Вс авг 18, 2013 16:10
- Откуда: Москва
- Имя: Ромка
- Мотоцикл: Пан
- Пол:
- Забанен: Бессрочно
Re: Гироскопический эффект
При разгоне зад осаживается, потому, что перед разгружается. Вес мота переносится назад, и зад проседает. При торможении ровно наоборот, вес идет вперед. Даже если тормозить одним задним тормозом, заднее колесо разгружается и легко срывается в юз.Lurker-beta писал(а):Ну как бы осаживание зада не имеет отношения к моменту двигателя. И зад не всегда осаживается. Более того на мотоциклах вроде приподнимается даже чаще.
По утрам надев усы, не забудьте про часы.
Д.С. Песков.
Д.С. Песков.
-
studentmoto

- На форуме: 11 Лет 1 День
- Сообщения: 1,458
- Зарегистрирован: Вт июл 28, 2015 13:02
- Род занятий: Мотошкола
- Откуда: moscow
- Имя: sergey
- Мотоцикл: XT727Z Tenere
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Sokos ну ооочень много букв ни о чем. Контрруление работает не из-за гироскопической прецессии а благодаря инерции, зачем снова выкладывать ошибочные суждения?
-
citymoto
- На форуме: 12 Лет 5 Месяцев 12 дней
- Сообщения: 622
- Зарегистрирован: Пн фев 17, 2014 22:22
- Род занятий: интересный
- Откуда: Moscow
- Имя: Dmitry
- Мотоцикл: Honda TA
- Пол:
- Контактная информация:
Re: Гироскопический эффект
А вот про осаживание мота кстать отчасти неверно, что осаживается. В сам моент старта он приподнимается. Проверить просто - упритесь колесом перпендикулярно препядствию, и попробуйте тронуться и попросите заснять этот момент. Мот сначала пытается поднять, провернуть маятник. Именно поэтому мот и встаёт на заднее колесо. А как только тронулся , то вес мота и переносится на зад, приподнимая мот и, соответственно, аморты просаживаются и зад загружается. Но в момент трогания - он приподнимается.
А при торможении -если сначала начинать притормаживать задом, и потом передним, то мот будет намного слабее клевать, т.к. он будет прижиматься и задом и передом. При включении в торможение сначала зада - тормозящее колесо будет пытася провернуть маятник по ходу движения - то есть сжимать аморты. Эти эфекы отлично наблюдаются и мотов с большими ходами подвесок - турынды, эндурики, супермото. На спортах да ещё и на самых жёских настройках- очень слабо заметно.
А при торможении -если сначала начинать притормаживать задом, и потом передним, то мот будет намного слабее клевать, т.к. он будет прижиматься и задом и передом. При включении в торможение сначала зада - тормозящее колесо будет пытася провернуть маятник по ходу движения - то есть сжимать аморты. Эти эфекы отлично наблюдаются и мотов с большими ходами подвесок - турынды, эндурики, супермото. На спортах да ещё и на самых жёских настройках- очень слабо заметно.
-
Billy.Bob

- На форуме: 13 Лет 1 Месяц 10 дней
- Сообщения: 6,072
- Зарегистрирован: Ср июн 19, 2013 09:15
- Род занятий: Техцентр БМВ
- Откуда: Мск, Замоскворечье
- Имя: Вовка
- Мотоцикл: ZX-6R + ST150
- Пол:
- Контактная информация:
Re: Гироскопический эффект
Sokos епать трактат 
и главное ниочем
и главное ниочем
- Ass, Gass or Grass nobody rides for FREE
-
Lurker-beta
- На форуме: 17 Лет 6 Месяцев 11 дней
- Сообщения: 4,968
- Зарегистрирован: Вт янв 20, 2009 17:43
- Род занятий: IT
- Откуда: Москва
- Имя: Алексей
- Мотоцикл: Фазер 0.2633856 куб. попугая
- Пол:
- Контактная информация:
Re: Гироскопический эффект
При разгоне заднее колесо пытается въехать под мотоцикл(точка приложения силы-пятно контакта).Ромка-лодырь писал(а):При разгоне зад осаживается, потому, что перед разгружается. Вес мота переносится назад, и зад проседает.
Из-за геометри задней подвески это приводит к тому, что оно идёт не вперёд, а вперёд-вниз.
Раз колесо идёт вниз, то подвеска разжимается.
Какая из сил будет больше, или они будут уравновешивать друг друга зависит от геометрии конкретной подвески.
У мотоциклов подвеска разжимается, чтобы при правильном(на газу) прохождении поворота увеличивать клиренс.
Там смесь этих эффектов. Чем больше скорость, тем больше влияет эффект гироскопа.studentmoto писал(а):Контрруление работает не из-за гироскопической прецессии а благодаря инерции
На заднее колесо он встаёт потому, что всё относительно. Если мот пытается крутить колесо в одну сторону, это же означает что он пытается крутить себя вокруг колеса в противоположную сторону.citymoto писал(а):Именно поэтому мот и встаёт на заднее колесо.
Любой мотоцикл прослужит вам до конца жизни, если ездить на нём достаточно быстро.
Игнор лист:Bungle
Игнор лист:Bungle